
Case study / 02
driVR
Multiplayer VR with IR-LED tracking. Karts, headsets, a working prototype.
Closed chapter
This is a paused R&D project documented as a case-study archive — not a currently shipping product.
What follows is the concept, the engineering effort, the prototype arc, and the lessons. Discontinued · Techniques transferable · IR-tracking mesh, multi-actor Unity coordinate frame, latency-budget management all reusable.
- The concept
- The engineering effort
- The prototype arc
- What it taught us
What we built
Eight infrared LEDs, four corner cameras, and one shared coordinate frame.
The headset drifts through the play space. Eight IR LEDs sit on its outer shell in a deliberately asymmetric pattern — that asymmetry is what lets the camera mesh recover not just position but pose. Each tracking camera draws a live ray to every LED its frustum can see. Watch the rays fade in and out as the headset turns: that's the tracking system reasoning about visibility in real time.
01 · Asymmetric LED constellation
Eight IR emitters arranged so no rotation maps onto another. With six visible at any moment, six-degree-of-freedom pose is recoverable.
02 · Corner-mounted cameras
Four play-space cameras with IR-pass filters. Each one's frustum cone is rendered translucent so the geometry of the tracking volume is visible.
03 · Live tracking rays
One ray per camera × LED pair. Visibility is computed every frame from frustum geometry — when a ray fades, that camera has lost sight of that LED.
The problem
VR was solo by default. I wanted multi-player in the same physical room.
I started driVR in 2017 as a Mario-Kart-with-VR-goggles experiment — could multiple people share one physical room, see each other in the virtual one, and drive in the same world? The problem with existing multi-user tracking in 2017 was cost: Vicon-tier rigs were not garage-tier accessible. The constraint wasn’t technical — it was whether you could build tracking for the room at a price that made sense for the project.
The approach
Custom IR-LED tracking + a Unity-VR map shared across players.
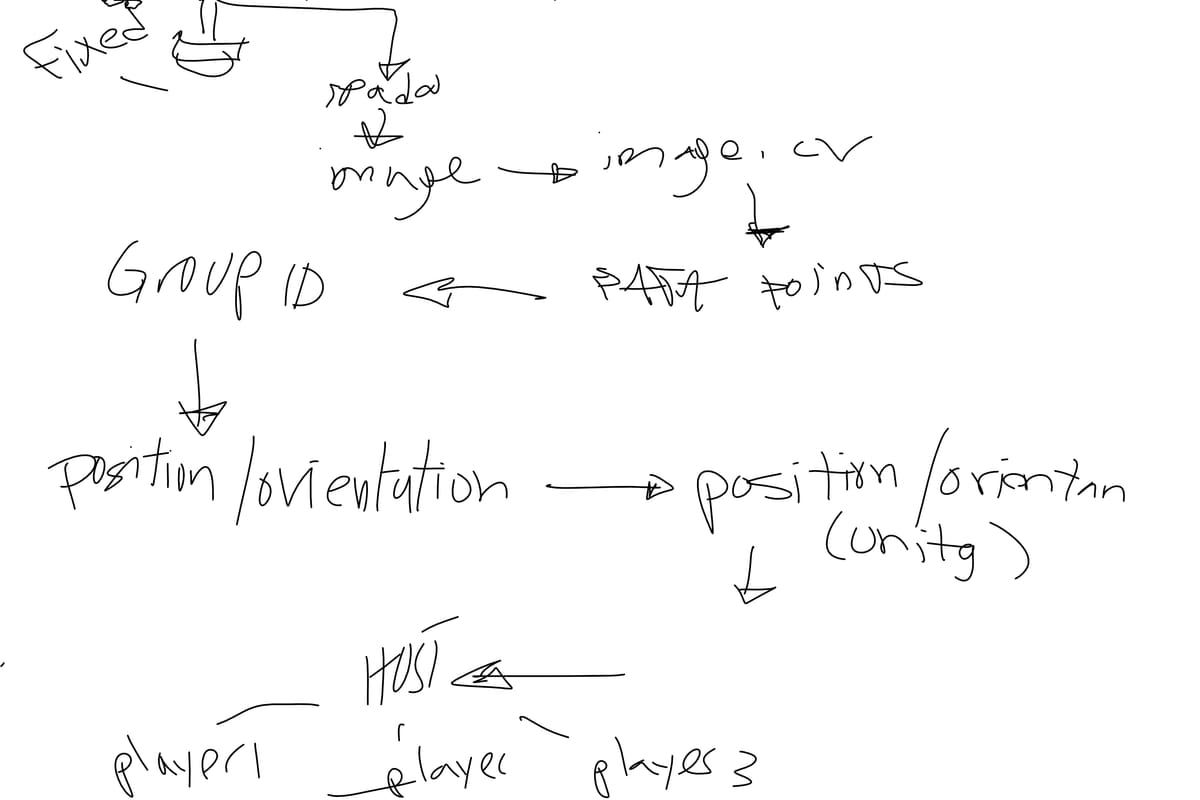
I built a tracking system using infrared LEDs on each headset and cart, with cameras around the play space resolving each LED constellation to a player position in 3D. The tracking data fed into a custom Unity-VR map with one shared world space — each player saw the others rendered in the same coordinate frame in real time.
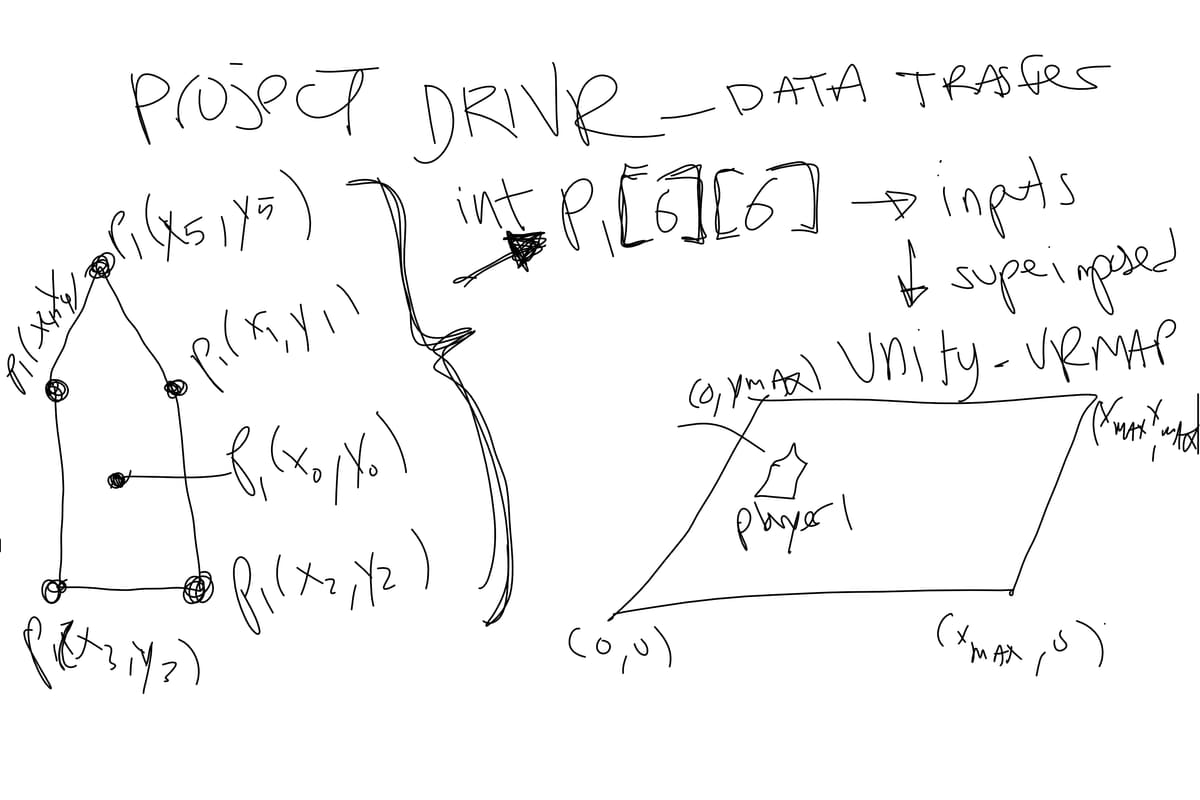
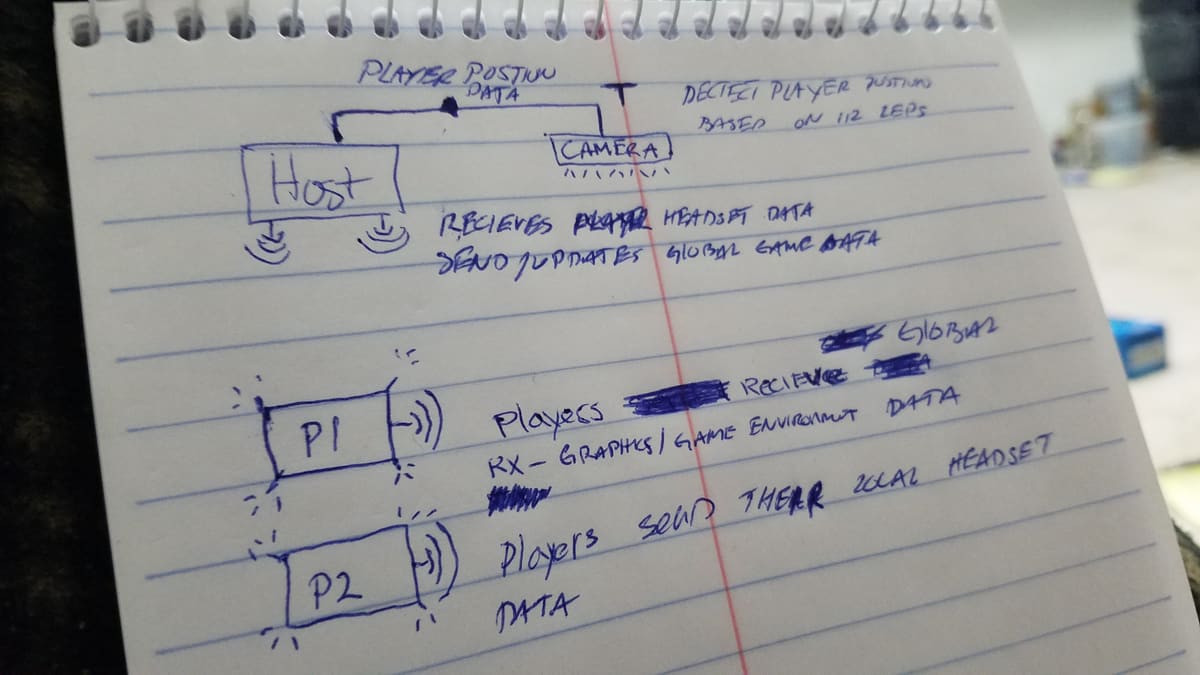
Tracking colors were the first approach (visible-spectrum blobs). They were too fragile under varied lighting, so I moved to IR LEDs and IR-pass camera filters. The data-flow architecture — P[N][6][6] input matrices superimposed onto the Unity map — was the load-bearing design choice. It’s in the sketches in the gallery.
The proof
A working multi-player prototype. Karts, headsets, latency under control.
By 2020 the prototype was riding two to three players in the same physical space, each in a VR headset, each driving a kart, each seeing the others rendered in real time. Bench-test footage documented the demo runs (the .mp4 captures are in the source archive — deferred from this build to keep the static export light; re-fetchable on request).
R&D archive
Eight frames, sorted by what they are.
Concept sketches, tracking-system research, and field-test photos — each labeled with what it’s showing and where in the project arc it sits.
Concept Sketches
1 item
The first ideas, in their original form. Hand-drawn or sketched fast — preserved as archive material rather than presented as polished marketing visuals.
Technical Research
2 items
Schematics, control-flow diagrams, and the working notes that turned the concept into something buildable.
 Original/ 02
Original/ 02Data transfer matrix — input superimposition
How multi-player state flows between the headset constellation, the cart inputs, and the Unity coordinate frame.
 Original/ 03
Original/ 03Tracking-color experiment, 2016
Visible-spectrum blob tracking — abandoned because it was too fragile under varied room lighting.
Build Artifacts
5 items
Photos from the bench, the shop, the test rig, and the running system. The R&D actually happened.
 Original/ 04
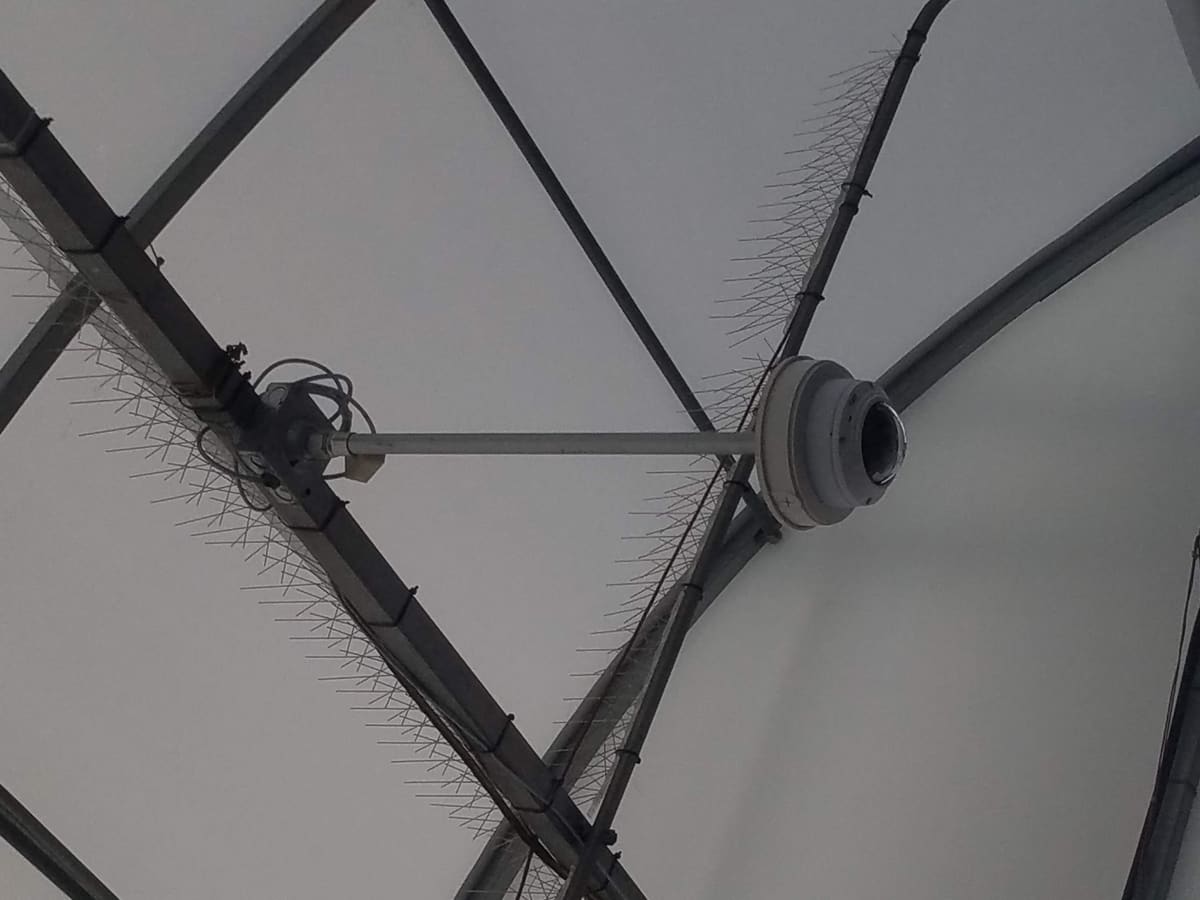
Original/ 04Field testing the IR rig, 2019
First moves to IR-LED + IR-pass-filter cameras after the visible-spectrum approach hit its limit.
 Original/ 05
Original/ 05Multi-player session, 2020
Two players sharing the play space, each in a headset, each driving a kart, each rendered to the others.
 Original/ 06
Original/ 06Headset integration build, July 2019
Mounting the IR-LED constellation on the consumer headset shell.
 Original/ 07
Original/ 07Same rig, different angle
Mechanical detail of the IR mount.
 Original/ 08
Original/ 08Demo capture frame
Working demo — what the play session looked like through the camera mesh.
Outcome
Discontinued — but the IR-tracking work generalizes.
driVR was discontinued as the consulting practice took priority and the consumer-VR market reshaped around different headsets and tracking solutions. The IR-LED constellation tracking, the multi-player Unity-VR data architecture, and the latency budget management are all transferable techniques for any project that needs low-cost multi-actor spatial tracking.